ADORA2 Pro
三轮升降通用型移动式机器人

小巧三轮底盘运动灵活
ADORA2 Pro机器人采用小底盘设计方案,在比较狭窄的室内运动时灵活方便。
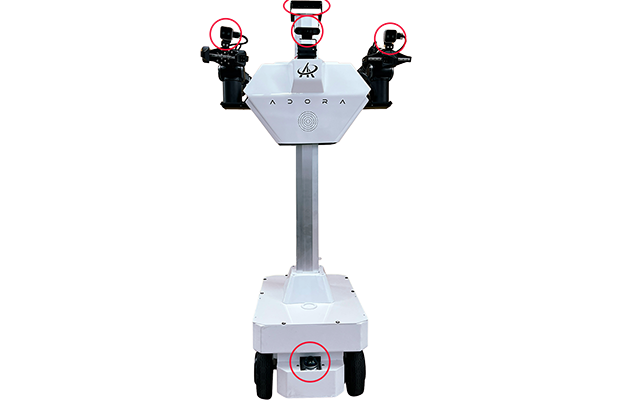
配四路相机和激光雷达
双臂腕部、头部、柱顶各配1个相机总计四路深度和广角相机,底盘配备激光雷达,能够实现更精准的环境感知和导航。

语音和视频多模态交互
ADORA2 Pro机器人大脑具备视觉和语言输入理解能力,用户可以通过语言或视觉指令自然、轻松地与机器人互动,实现无缝沟通。

适用于批量动作数据采集
ADORA2 Pro机器人搭配低成本高精度机械臂和直观的数据采集工具,适用于进行批量数据采集的工作,包括家务操作、工业搬取转运等等场景。
应用场景
ADORA2 Pro的应用场景

数据采集

物品分拣

家务劳动

运动竞赛
Adora2 Pro参数规格
主要的软件和硬件参数
| 模块 | 内容 | 参数 |
|---|---|---|
| 整机参数 | 产品重量 | 约60KG |
| 产品尺寸 | 420mm(高)*520mm(肩宽)*1500mm(体厚)(不含机械臂) | |
| 最大移动速度 | 1.2m/s | |
| 工作时长 | 2H | |
| 算力单元 | 主板配置 | RK3588/NVIDIA NX/昇腾310P |
| 硬盘 | 128GB NVMe固态硬盘 | |
| 操作系统 | Ubuntu/开源鸿蒙OS | |
| 视觉和距离传感器 | 深度相机 | 3个 |
| 激光雷达 | 无 | |
| 机械臂和末端执行器 | 机械臂配置 | 2只/7自由度 |
| 机械臂精度 | 1mm | |
| 机械臂工作半径 | 600mm | |
| 末端执行器 | 二指夹爪 | |
| 最大抓握重量 | 2kg |